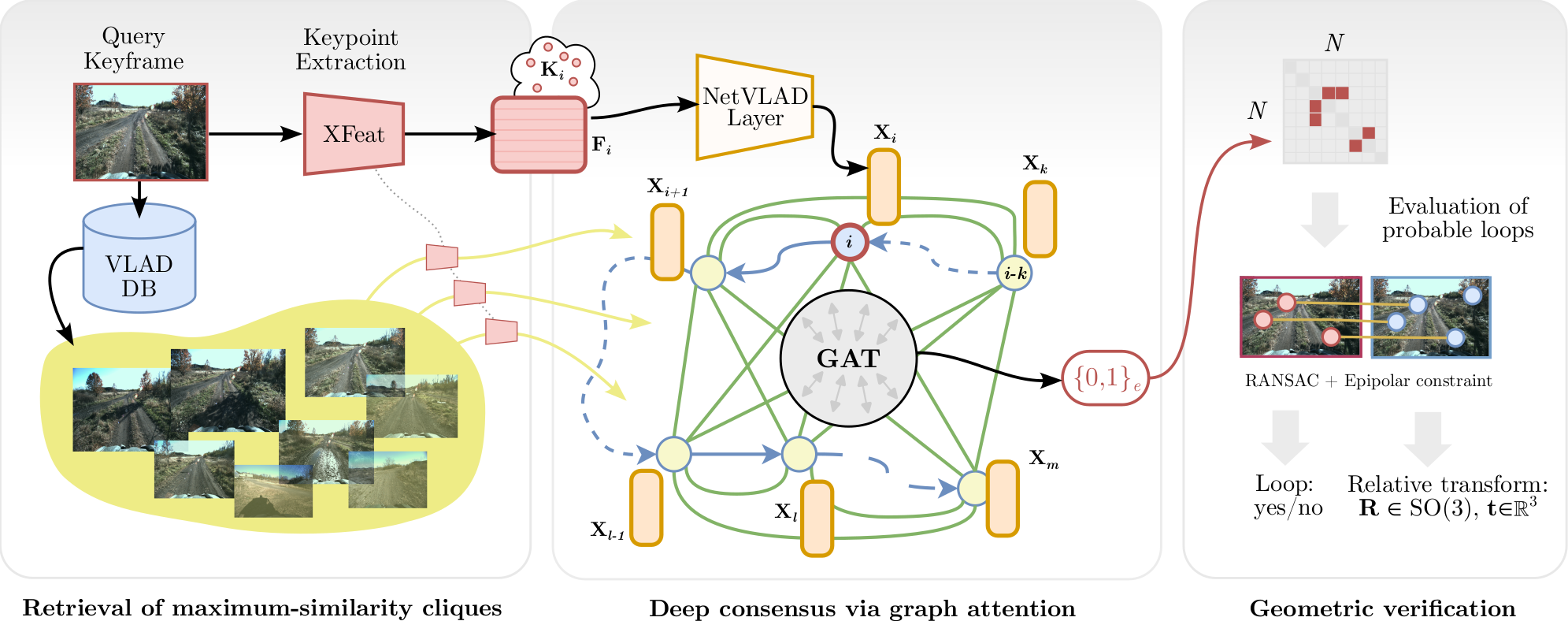
LoopGNN approach: We create keyframes from robot trajectories and utilize a deep keypoint extractor such as XFeat [25] to obtain keypoints for each image. Next, we fit a VLAD-based place recognition model allowing robust and fast retrieval of similar frames given a query frame (left). In the following, given a query frame, we independently encode the keypoint descriptors of all frames (query and retrieved ones) using a NetVLAD layer and construct a neighborhood graph. We feed this attributed graph into a graph attention network in order to produce a deep consensus regarding loop closures among keyframes of the neighborhood (middle). Finally, we extract the set of highest-scoring edge-wise predictions of the network and validate pairs of frames using RANSAC-based geometric verification (right).